 0
0 0
0


- 自动驾驶辅助系统ADAS主要功能规范——软件测试圈
盲区预警(BSW blind spot detection)
通过车辆周围排布的传感器及盲点探测器,在超车、换道、大雾、雨天等易发生危险的情况下,通过后视镜以及仪表显示提醒驾驶员。当驾驶员开启该功能时,车速处于20-70km/h的行车工况下,未开启转向时,当同向车道有同速度车辆,进行后视镜显示报警信息,当开启转向时,增加仪表信息显示报警。
车道偏离预警(LDW lane departure warning)
当系统开启时,摄像头会时刻采集车道线,通过图像处理获取车辆的位置参数,当检测到车辆偏离汽车轨道时,传感器会及时手机车辆数据和驾驶员操作状态,发出警报,如果驾驶员打开转向灯,则不发出报警。当驾驶员开启该功能时,天气条件良好,车道线清晰,车道曲率半径大于200m的车道,车速范围10-70km/h,驾驶员未踩刹车,未打开转向灯,未开启双闪等条件下ADAS使能该功能,当出现报警灯时,通过CAN总线发送到仪表上进行闪烁显示,并用声音提示。
车道保持辅助(LKA lane keeping assist)
通过视觉传感器采集图像信息,利用转速传感器采集车速信息,利用转向角度传感器采集转向信息,然后对车道线进行识别,通过对比车道线与行驶方向,判断车辆是否偏离行车轨道,当车辆偏离轨道的趋势时,发出声音提醒,当车辆发生车道偏离时,计算所需的转向力,将车辆返回车道中。当驾驶员开启该功能时,天气条件良好,车道线清晰,车道曲率半径大于200m的车道,车速范围30-70km/h,驾驶员未踩刹车,未打开转向灯,未开启双闪等条件下,ADAS使能该功能,当车辆偏离轨道的趋势时,会通过仪表发出车道偏离预警灯提醒,当车辆发生车道偏离一段时间后,转向系统会进行干预,计算所需的转向力,将车辆返回车道中。
碰撞预警系统(FCW forward collision warning)
利用雷达及摄像头侦测与汽车的距离,根据ECU做出分析,根据与前车的距离及相对车速,当存在发生碰撞风险时,发出警报,FCW系统不会采取任何措施控制车辆。或者轻踩刹车,并拉紧安全带,发出警报,若无法避免时,会启动AEB,收紧安全带。当驾驶员开启该功能时,车速处于20-70km/h的行车工况下,未打转向灯,打方向盘角度小于5度,未开启双闪时,当识别到与前车有碰撞危险时,FCW根据距离进行频率变化的声音进行报警。
全速自适应巡航(FSRA Full speed range adaptive cruise control )
通过按照在车前的传感器,识别前车的车速与相对距离,与前车时钟保持在设定的距离范围内,当发现与前车距离过小时,主动控制车辆进行减速;当与前车的距离增加到安全距离时,按照设定车速控制车辆行驶。同时可控制车辆自动跟随前车至停车,并重新跟随。当车速处于0-160k/h的行驶工况,功能开启,设定巡航速度,设定跟车距离,通过车辆与前车的状态进行速度控制,在拥堵时,能够自动进行起停车辆的操作。
自动紧急制动(AEB automatic emergency braking)
利用雷达和摄像头侦测与汽车的距离和行人的情况,根据ECU做出分析,根据距离及车速的不同,发出警报,当驾驶员未进行接管时,当距离不在安全距离范围内时,将自动启动刹车系统。当驾驶员开启该功能时,车速处于20-70km/h的行车工况下,未打转向灯,打方向盘角度小于5度,未开启双闪时,当识别到与前车有碰撞危险时,AEB根据距离进行预警、制动、紧急制动;当识别到与前车有碰撞危险时,驾驶员制动力不足时,AEB会施加一定的制动力叠加到制动系统,避免碰撞。
交通标志识别(TSR)
通多摄像头识别道路上的限速牌,并对驾驶进行提醒。当驾驶员开启该功能时,车速处于20-70km/h的行车工况下,当识别到限速标志牌,通过仪表显示限速值及声音提示驾驶员。
自动泊车(APA automatic parking assist)
由安装在车身上的摄像头、超声波传感器、红外传感器,以及控制单元,在该系统激活的情况下,自动帮助驾驶员将车停入车位。当驾驶员开启该功能,车速小于8km/h,摄像头识别车位坐标,仪表显示运行的相关信息。系统通过分析侧雷达的距离信息识别可泊入的平行、垂直、鱼骨车位标识车位后,判断车辆的状态、车门的状态、驾驶员安全带、档位模式,HMI提示驾驶员长按APA 开关,进入泊车模式,泊入完成后,车辆自动挂 P 档,HMI提示泊车完成。当泊车过程中,驾驶员踩下刹车、油门、换档、拉手刹,按下 APA 开关,开启车门、松开安全带等条件时,APA会退出泊车模式。
交通拥堵辅助驾驶(TJA traffic jam assist)=ACC+LKA+AEB
该功能是自动驾驶各个功能的组合,形成的功能叫做领航pilot,具备一定的自动驾驶的能力。TJA工作区间在0-60km/h,可提供横向和纵向的车辆控制,ACC负责纵向车辆控制,LKA主要负责横向驾驶辅助,维持在车道内行驶,当出现拥堵时,外道车辆的窜入,需要AEB系统的介入。
高速公路辅助驾驶(HWA highway assist ) = LKA+LJA+TSR
该功能是自动驾驶各个功能的组合,形成的功能叫做领航pilot,具备一定的自动驾驶的能力(L2-L3之间的功能)。当车辆处于高速公路车速小于120km/h的行车状态时,根据驾驶员打转向灯进行变道,能对驾驶员的状态进行监控(驾驶员监控系统),能够实现TJA功能,能够进行道路标识,限速标识的识别(TSR),以及进行车道的探测和车道的保持(LKA),以及弯道的车辆行驶,并能够通过导航信息进行语音提示。
除此之外,还有很多功能,如PCW 行人碰撞预警,DOW:开门报警,LCA:变道辅助,LCC:车道居中控制,EMA:紧急避让辅助,AES:自动紧急转向避让,AVM:全景环视监控等等功能。
作者:汽车电控技术开发
- -1.00 查看剩余0%
- 【留下美好印记】赞赏支持

热门文章
最新讲堂
- 推荐阅读
- 换一换
- 开发环境,测试环境,生产环境——软件测试圈05-23提到测试环境,首先就要搞清楚开发环境,测试环境,生产环境三者有什么区别?项目部署环境一般可分为三种:生产环境,测试环境,开发环境开发环境:开发环境时程序猿们专门用于开发的服务器,配置可以比较随意,为了开发调试方便,一般打开全部错误报告和测试工具,是最基础的环境。测试环境:一般是克隆一份生产环境的配置,一个程序在测试环境工作不正常,那么肯定不能把它发布到生产服务器上,是开发环境到生产环境的过度环境。生产环境:生产环境是指正式提供对外服务的,一般会关掉错误报告,打开错误日志,是最重要的环境。部署分支一般为master分支。上述环境也可以说是系统开发的三个阶段:开发->测试->上线,其中...
- 埃隆-马斯克(Elon Musk)的卫星宽带公司Starlink周二表示,它正在遵守巴西最高法院法官亚历山大-德-莫赖斯(Alexandre de Moraes)的命令,禁止在该国访问社交媒体平台X。 Starlink公司在 X 网站上发文称,它已向巴西最高法院提起法律诉讼,解释莫赖斯命令的"严重非法性",该命令冻结了Starlink公司的财务渠道,使其无法在巴西进行金融交易。 X 发布公告说:"无论Starlink公司在冻结我们的资产方面受到何种非法待遇,我们都将遵守在巴西阻止访问 X 的命令。"公司补充说,它将继续寻求所有法律途径,其他公司也...
-
- Jest:目前最广泛使用的前端测试框架08-26Jest 是一个简单易用的 JavaScript 测试框架。最初由 Meta 公司团队维护。2022 年 5 月,Meta 公司正式将自己的开源项目Jest 移交给 OpenJS Foundation[1],这表示 Jest 由公司驱动变为社区驱动,有 OpenJS Foundation 保底,Jest 将不会因公司发展需要而停止维护。 下面我们就来学习吧。 快速上手 初始化项目 首先创建项目目录: mkdir jest-demos && cd jest-demos npm init&nbs...
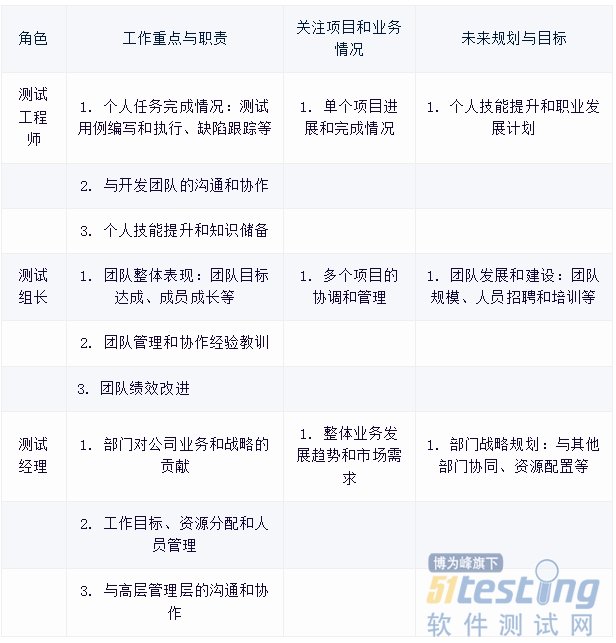
- 不同测试角色年终汇报总结异同点——软件测试圈01-25一 不同测试角色年终总结重点及案例 刚刚结束了一波战斗,费脑又费精力,周末在家写了一天年终总结,在写的过程中,颇有感触。又到了一年的尾声,作为搬砖人来说总结写的好不好关乎个人切身利益,从个人发展角度来看可总结经验教训、寻找工作规律,培养、锻炼自己的思维方法提升个人工作能力;从小组及公司层面来看一份具有参考价值的报告可增强团队凝聚力,为企业提供决策依据。年底一般企业都会针对项目写总结,一般流程是组员呈交给组长,组长递交给测试经理所以每个层级写各自的总结,会有不同的侧重点,下面分别来聊聊测试工程师、测试组长以及测试经理年终总结的关注点在什么地方以及采用什么样的方法及策略使年终总结有实际意义且...
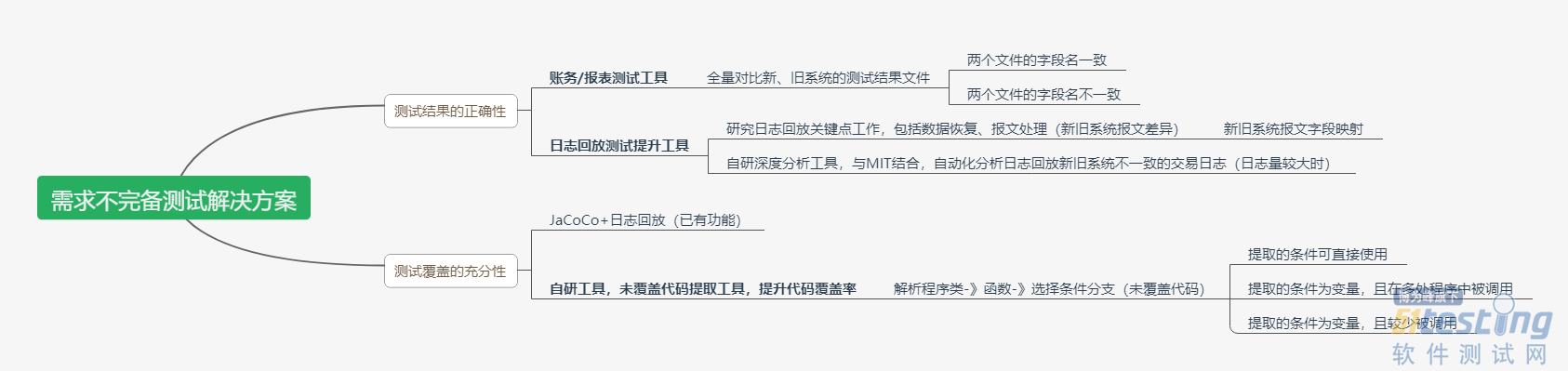
- 1 痛点和研究背景 目前随着分布式核心下移和小型机下线的趋势,主流系统架构已逐步演变为CCE+TDSQL。而在这一演进过程中也陆续暴露出来一些痛点难点问题,需要我们着力解决。为此,我们聚焦于分布式架构下需求、架构、数据这三个方面的痛点问题探索解决途径和措施展开了研究。第一,需求缺失的问题,分布式核心下移和小型机下线涉及的系统体量大、业务逻辑复杂,需求说明书持续迭代的情况下说明书内容已逐渐滞后缺失,易导致测试遗漏的出现。第二,架构痛点,分布式事务一致性逻辑复杂,目前主要基于手工测试,依赖于开发人员修改程序构造异常事务场景,导致测试费时费力;多微服务间的参数配置存在关联关系,微服务个数较多时...
-

{kind=link}
{kind=link}
{kind=link}
- 关于我们 联系我们 版权声明 广告服务 站长统计
- 建议使用IE 11.0以上浏览器,800×600以上分辨率,法律顾问:上海兰迪律师事务所 项棋律师
- 版权所有 上海博为峰软件技术股份有限公司 Copyright©51testing.com 2003-2024, 沪ICP备05003035号
- 投诉及意见反馈:webmaster@51testing.com; 业务联系:service@51testing.com021-64471599-8017

- 51testing软件测试圈微信