 0
0 0
0


- 汽车传感器到中央计算的传输:MIPI技术——软件测试圈
传感器、这些传感器输出的ML推断结果是自动辅助驾驶的重要核心。Mixel和Rambus在MIPI DevCon上就这种传输技术MIPI进行了讲解,涉及了来自Rambus的摄像头串行接口(MIPI CSI-2)和来自Mixel的物理接口(MIPI C-PHY和MIPI D-PHY)

MIPI CSI-2和PHY传输和接收模块
MIPI CSI-2是定义摄像头和ISP(图像信号处理器)之间串行接口的功能。像素从一端流入,最终从另一端流出,所以该接口需要一个发送功能和一个接收功能。由于这些功能必须能够连接任何摄像头(或多个摄像头)到任何ISP,需要很大的灵活性,比如传感器和最终消费者之间的带宽匹配,允许例如连续的流式传输。

在CSI-2的发送和接收功能之间,D-PHY(或C-PHY)负责物理通信。D-PHY使用差分信号,而C-PHY则使用巧妙的差分技术,配合编码,支持更高的数据传输速率。这些技术虽然复杂,但显然支持比D-PHY更高的数据速率。
PHY的安全性
这些IP是为汽车应用设计的,因此安全性是一个关键目标。PHY和控制器都必须满足ISO 26262标准中适当ASIL级别的FMEDA要求。此外,安全关键的汽车应用需要对MIPI PHY进行系统内可测试性。我看到类似的系统内可测试性要求在其他PHY中变得越来越普遍,特别是在ASIL-C/D级别,所以这并不奇怪。Mixel的MIPI PHY支持通用配置(Tx+Rx)的全速和系统内环回测试,以及其自己的区域优化的仅发送和仅接收配置,分别被称为TX+和RX+。

Mixel还指出了汽车IP需要额外的测试:应力测试、HTOL(高温、高压、恶劣环境下的电老化)和可靠性测试(如老化测试)。这些测试,再加上符合ISO 26262标准的DFMEA(失效模式与影响分析)和FMEDA(故障模式、影响和诊断分析),确保了IP的整体可靠性,这对于汽车安全在15年以上的服务寿命中至关重要。
CSI-2控制器中的安全性
为了满足ASIL-B级别的故障覆盖要求,Rambus的CSI-2控制器核心采用了内置自测(BIST)机制。在这里,BIST机制与熟悉的安全缓解技术一起使用:ECC(错误检测和校正码)、CRC(循环冗余校验)、奇偶校验等。有趣的是,这里的BIST是在IP级别进行的,而不是在系统级别。
在NoC中看到的是,在系统内测试中也采用了相同的原则。在这两种情况下,主张的观点是,与系统级别BIST相比,功能级别的BIST在多个方面更好。它可以更深入地测试,并提供对安全覆盖范围更有信心。即使系统级别没有提供BIST,也是可用的,如果系统变得不可操作,可以提供中央反馈。
在安全缓解技术方面,CSI-2控制器对像素和像素缓冲区提供了奇偶校验保护。此外,协议头使用ECC进行保护,数据包使用CRC进行保护。这些技术为数据格式化、打包逻辑、关键状态机和其他关键模块提供了冗余。还会检查数据包的顺序,并标志顺序错误。
安全关键应用中看到的另一个有趣检查是看门狗定时器,用于检测操作是否被冻结或过度延迟。所有这些都强调了在高ASIL级别下,安全缓解不再只是基本方法。设计者正在增加更多主动和复杂的测试和缓解措施,以适应ASIL-C/D级别的要求。
作者:佚名
- -1.00 查看剩余0%
- 【留下美好印记】赞赏支持

热门文章
最新讲堂
- 推荐阅读
- 换一换
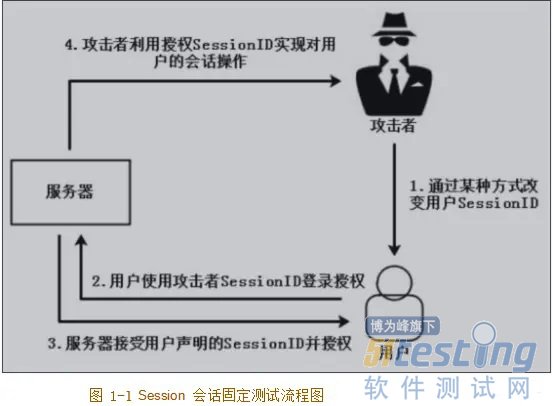
- 1.1测试原理和方法 Session 是应用系统对浏览器客户端身份认证的属性标识,在用户退出应用系统时,应将客户端Session认证属性标识清空。如果未能清空客户端 Session 标识,在下次登录系统时,系统会重复利用该Session标识进行认证会话。攻击者可利用该漏洞生成固定Session会话,并诱骗用户利用攻击者生成的固定会话进行系统登录,从而导致用户会话认证被窃取。 1.2测试过程 在注销退出系统时,对当前浏览器授权 SessionID 值进行记录。再次登录系统,将本次授权 SessionID 值与上次进行比对校验。判断服务器是否使用与上次相同的 SessionID 值进行授...
-
- 一、遇到的问题在做移动端的UI自动化测试时,经常会遇到上图所示的搜索框,这里有个麻烦就是搜索框没有“搜索”按钮,UI自动化测试时不能确认搜索。要解决这个问题,我们可以通过 driver.press_keycode('66') 方法模拟键盘回车,具体的使用方法请参考:http://testingpai.com/article/1595507207594/comment/1595559375540但是这种方法只能适用于Android环境,iOS环境不能使用。由于我是在Webview环境做UI自动化测试,无论是Android环境,iOS环境都可以使用js方法解决疑难杂症,操作时只需要...

-
- 自2018年被评选为编程语言以来,Python在各大排行榜上一直都是名列前茅。目前,它在Tiobe指数中排名第三个,仅次于Java和C。随着该编程语言的广泛使用,基于Python的自动化测试框架也应运而生,且不断发展与丰富。因此,开发与测试人员在为手头的项目选择测试框架时,需要考虑许多方面的因素,其中包括:框架的脚本质量,测试用例的简单性,以及运行模块可能存在的技术弱点。为了避免出现“选择困难症”,我在此为大家准备了五种Python类型的自动化测试框架,以供比较和讨论。1.Robot Framework作为最重要的Python测试框架之一,Robot Framework主要被用在测试驱动(te...
-
- 系统容量测试初探——软件测试圈06-09当前,系统测试主要集中在功能测试、性能测试以及安全测试三大方面,对于容量测试的关注比较欠缺,特别是磁盘容量空间。从系统测试业务连续性上考虑,容量测试是其中不可或缺的步骤,做好容量测试可以进一步优化信息系统服务能力,从而提供持续、合理的系统服务。 对于容量测试,首先需要明确几个概念。容量管理,是指根据当前和未来的业务需求,在恰当的时间、以恰当的成本提供所需的IT资源。管理对象是对环境中的业务应用系统、主机平台设备、开放平台设备、网络、机房环境设施等进行容量规划。容量评估,是指对系统是否能够达到要求的生产能力,并且有一定超负荷运行能力以满足未来市场的高峰要求的评估。 本文从测试阶段出发,针...

- 填一份51Testing行业调查问卷吧?内含2019-2022年的技术趋势和热点。点击下方链接,不仅能帮助你更了解测试行业,还能免费获得实战课程~链接:http://vote.51testing.com/ 性能测试往往在投产上线前开展,无法对整个系统变更进行全面的覆盖测试,因此性能测试需求提出十分关键。性能测试需求交付过程中,需要对开发团队提出的测试需求进行审查,重点分析交付的测试需求是否充分覆盖了影响系统性能的因素,避免遗漏重要测试项,引发生产性能事件。 在很多企业中,性能测试需求交付都设置有需求评审环节,需求审查的动作也会包含系统变更影响性分析,其中最关键的分析内容就是梳理影响系统...
-


{kind=link}
 方法模拟键盘回车,具体的使用方法请参考:http://testingpai.com/article/1595507207594/comment/1595559375540但是这种方法只能适用于Android环境,iOS环境不能使用。由于我是在Webview环境做UI自动化测试,无论是Android环境,iOS环境都可以使用js方法解决疑难杂症,操作时只需要...&url=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=144402&content=utf-8&sourceUrl=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=144402&pic=http://quan.51testing.com/ueditor/php/upload/image/20220104/1641261311842128.png){kind=link}
{kind=link}
- 关于我们 联系我们 版权声明 广告服务 站长统计
- 建议使用IE 11.0以上浏览器,800×600以上分辨率,法律顾问:上海兰迪律师事务所 项棋律师
- 版权所有 上海博为峰软件技术股份有限公司 Copyright©51testing.com 2003-2024, 沪ICP备05003035号
- 投诉及意见反馈:webmaster@51testing.com; 业务联系:service@51testing.com021-64471599-8017

- 51testing软件测试圈微信