 0
0 0
0


- 车载测试真相大揭秘!这些基础问题你一定要知道——软件测试圈
1.简述ADCU(域控)有哪些基本组成单元?
MCU,SOC,加解串器,CAN收发器,网络交换机,电源管理模块芯片PMIC等。
2.MCU和SOC的区别是什么?主要应用场景分别有哪些?
MCU为主控芯片,底盘域以及车身域等对算力要求不高的域其主控芯片多使用传统的MCU芯片;
SOC为计算芯片,集成了CPU、图像处理GPU、音频处理DSP、深度学习加速单元NPU,内存与各种I/O接口;
考虑到智能座舱域及智能驾驶域等对算力和安全性的要求均极高,控制器主控芯片普遍选择SOC芯片与MCU芯片搭配使用。
3.简述ADAS域控软件部分的实现流程?
由底层操作系统与中间层软件及上层应用软件组成控制器的软件系统。其中,底层操作系统及中间层软件主要为域控制器厂商或软件平台供应商提供。上层应用层自由度更高,可以由主机厂自研或委托第三方公司研发。最后将整个软件层集成后烧入域控制器硬件中,经过与整车的适配与标定后即可在车端实现智能驾驶功能与场景。
4.TTC是如何计算的?

5.雷达输出性能要求有哪些??
1)目标ID应保持稳定。①同一个目标应只有一个ID;②目标在?FOV内无遮挡干扰情况下,不管是由静态变为动态还是动态转为静态均需保持同一ID不跳变。
2)目标位置输出应与实际目标运动一致,不应出现位置跳变、丢失等异常情况。?
3)当自车经过停靠路边的车辆、墙体、护栏、花坛等障碍物时,雷达不应产生鬼影,并且要确保对其他运动目标的跟踪稳定、准确。
4)前雷达探测动态目标时,距离误差要求长距离模式下不超过±0.4m,短距离模式下不超过±0.1m,速度误差不超过±0.1kph。角雷达探测时,距离误差要求不超过±0.25m,速度误差不超过±0.18kph。?
5)目标中心位置与实际目标几何中心位置输出误差距离不超过±0.1m,远距离不超过±0.25m。
6.测试过程中前视摄像头探测动态目标时,采集设备的测量精度要求?

7.AEB常见的抑制条件有哪些?
①车速过快:当车速超过一定值时,AEB系统可能会抑制,以避免在高速行驶时突然制动,造成危险情况。
②障碍物距离过远:当障碍物距离车辆过远时,AEB系统可能会抑制,因为在此情况下刹车并不是必要的。
③障碍物无法识别:当障碍物的形状、大小或颜色不易识别时,AEB系统可能会抑制,以避免误识别为障碍物而采取不必要的制动措施。
④传感器失效:当AEB系统的传感器出现故障或失效时,AEB系统可能会抑制。
备注:AEB系统的抑制条件是由OEM设定的,可能会有所不同,因此在使用AEB系统时应当按照需求说明进行测试。
8.AEB误触发场景有哪些?

9.MIL/SIL/HIL在测试阶段有什么区别?
如果被测对象仅仅是开发阶段的算法,那只使用MIL/SIL就可以;如果被测对象是要在实车使用的控制器,那可能需要一套HIL设备提前进行测试、提前发现问题。
通信
1.ros通信机制有哪两种?
①节点间发布-订阅机制
②客户端-服务端之间请求-响应机制
2.UDS属于哪一层?数据如何传输?
UDS诊断服务位于应用层,应用层下面是网络层,所以诊断数据从应用层下压到网络层,由网络层进行数据的解包、打包、传输”
CAN相关
1.测试中常用的CAN通道有哪些?逻辑通道和物理通道是如何mapping的?
例:按照统一的标准设置。

2.CANoe怎么去连,怎么跟ECU去接,什么类型接口?测试时需要连哪些ECU?
ECU一般会从车上引出包括底盘CAN、车身CAN、FlexRay、雷达等接到CANoe上,CANoe连电脑上,接口一般是DB9的头,或者从车上的OBD引出来的接头。

3.主动安全和被动安全的区别?分别有哪些装置?
被动安全是指在交通事故发生之后能尽量减小人身损伤的安全装置。被动安全不能防止或避免事故的发生,但是,他们可在事故发生时,最大限度的减轻人身伤害程度,常见的被动安全装置有安全气囊、安全带等。
汽车安全仅仅有被动安全还不够,为了尽量防止/避免/减小安全事故的发生,汽车上为预防发生事故而采取的一系列安全设计,称之为主动安全设计。主动安全主要是防患于未然,在事故发生前工作,以减少事故发生。比如ABS防抱死系统,使得车子不至于抱死而打滑;ESP电子稳定系统,使得汽车运行和转向时更加稳定。
标定
1.内参和外参的区别?
内参指的是传感器本身固有的属性,如摄像头的焦距、镜头畸变等
外参主要用于统一车辆不同传感器(Camera、Lidar、Radar)之间的坐标系
2.内外参都需要自己标定么?
通常只需要标外参,内参由供应商自行标定
数据采集
1.数采有几辆车?单日采集里程多少?采集周期是多久?
例:采集车3辆,每天采集300-400km/车,采集周期大概在3个月
2.采集都有哪些场景覆盖?
时段:白天、傍晚、黑夜
天气:晴天、阴天、雨雪
车辆:大卡车、工程车、公交车、小轿车、SUV、皮卡、摩托车、作业车、事故车、异型车
VRU:行人、儿童、骑行人
关键场景:隧道、桥梁、匝道、大曲率弯、坡道、高架
3.采集用的侧视摄像头和环视摄像头有什么区别?
例:从功能上来说环视是鱼眼镜头分布于车身的前后左右四个方位,主要用于泊车场景。
侧视摄像头分为左前视/右前视/左后视/右后视,主要用于行车辅助功能,如DOW、LCA等。
作者:狼图腾
- -1.00 查看剩余0%
- 【留下美好印记】赞赏支持

热门文章
最新讲堂
- 推荐阅读
- 换一换
- 1、简介 麦德龙: - 麦德龙是一家面向HoReCa(酒店、餐厅和餐饮)行业客户的国际批发公司,业务遍及30多个国家,在全球拥有超过9.5万名员工。 - 它旗下Metro和Makro 两个品牌经营着661家批发门店(截至2022年9月30日)。麦德龙超市 - 麦德龙超市是一家零售批发超市集团, - 在麦德龙和万客隆(仅限欧洲)品牌旗下拥有多家麦德龙现购自运商场, - 是德国股票指数DAX的成分公司,世界500强之一,分店遍布32个国家。麦德龙仓储式超市 - 麦德龙仓储式超市是将超市和仓储合二为一的零售业态。&nb...

-
- 如何向老板说明你们真的需要自动化测试?11-08每年底除了对上一年的回顾以外,大家是不是都已经到了需要对下一年展望的时候?让我们回想一下过去的一年中,测试人员最烦的事情是什么呢?点点点比"点点点"更可怕的事情是什么呢?一直点点点不想一直点点点怎么办?上自动化!!!为什么公司之前没上自动化呢?老板一直没同意。。。以上的内心OS相信很多测试人员都经历过。反过来想一下,老板怎样会同意你的提议呢?一般的策略都是"动之以情,晓之以理"。动之以情这个改天展开说,就算是不混技术圈的老板,其实很多人对技术还是有一定的仰慕之情的。CC先生今天想聊聊的是晓之以理。金融学上一般会用ROI来判定一件事情是否值得做。Wikip...
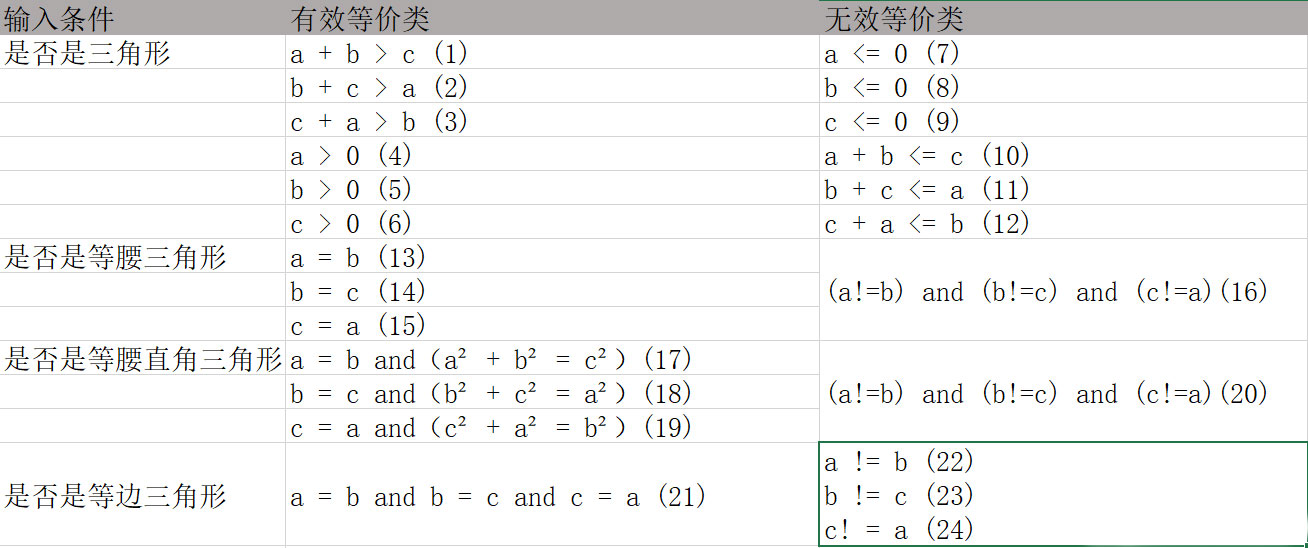
- 三角形三边面试题,是一个经典的很老的题了,在2011年的时候,华为面试遇到过,今天无意中搜到了,加上自己理解和思路汇总下,这个题主要是等价类划分的应用对一个三角形三边如何设计测试用例假设三边分别为A、B、C,那么根据现有条件,我们可以设计以下功能点先来看看构成三角形的条件1、任意两边相加之和大于第三边a + b > c a + c > b b + c > a2、两条边相等,两条边的平方和等于第三边的平方和a = b >&n...
-
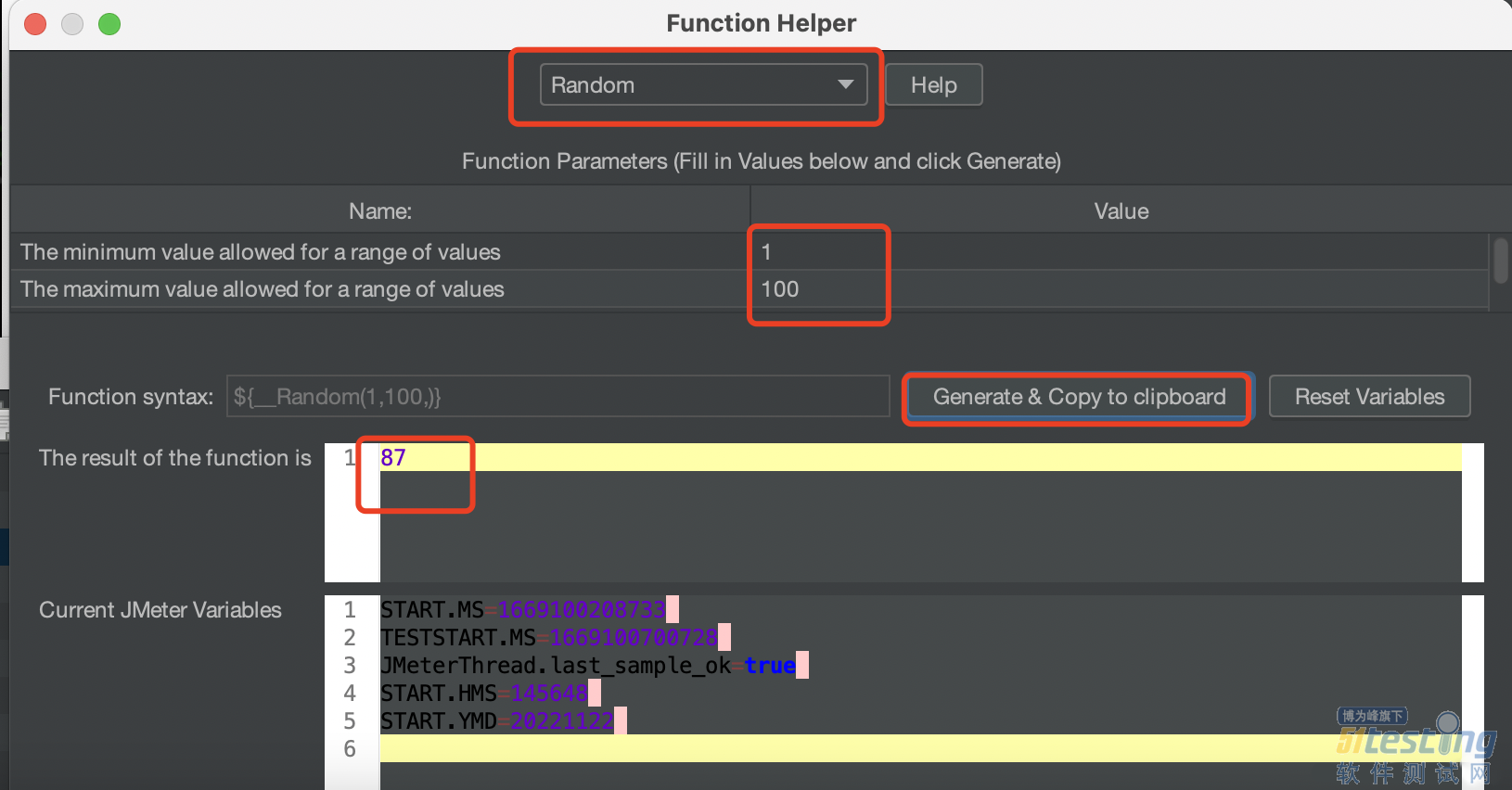
- 前言 Jmeter进行压测某个接口时,使用同一个参数进行压测是不符合实际场景的,真实的场景是多个不同参数同时进行压测试,那么配置的参数就必须是动态的变量。 Jmeter提供了一个函数助手功能。 JMeter生成随机函数 如图,我们在函数助手中新增一个 Random 随机生成函数,这里我们设置的是随机生成 1- 100的数字,点击下方的 Generate & Copy to clipboard,随机生成了一个292的数据,同时我们也复制了一段语法 ${__Random(1,100,)} 下面,我们以搜索的接口为例, 我们在随机生成函数后方定义一个变量名称 brandname...
-
- 近日有多名网友发现,DOTA2 周边商城中部分名字带有“英雄”的商品变成了“英雌”,引发许多玩家不满。 今日下午,DOTA2 官方就此发布了“关于 DOTA2 周边商城运营事故的处理公告”进行回应。作者:佚名原文链接:新浪科技_新浪网(sina.com.cn)

-



行业客户的国际批发公司,业务遍及30多个国家,在全球拥有超过9.5万名员工。 - 它旗下Metro和Makro 两个品牌经营着661家批发门店(截至2022年9月30日)。麦德龙超市 - 麦德龙超市是一家零售批发超市集团, - 在麦德龙和万客隆(仅限欧洲)品牌旗下拥有多家麦德龙现购自运商场, - 是德国股票指数DAX的成分公司,世界500强之一,分店遍布32个国家。麦德龙仓储式超市 - 麦德龙仓储式超市是将超市和仓储合二为一的零售业态。&nb...&url=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=145523&content=utf-8&sourceUrl=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=145523&pic=http://quan.51testing.com/ueditor/php/upload/image/20221027/1666840227105131.jpg){kind=link}
{kind=link}
{kind=link}
} 下面,我们以搜索的接口为例, 我们在随机生成函数后方定义一个变量名称 brandname...&url=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=147209&content=utf-8&sourceUrl=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=147209&pic=http://quan.51testing.com/ueditor/php/upload/image/20240905/1725525450535735.png){kind=link}
&url=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=146412&content=utf-8&sourceUrl=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=146412&pic=http://quan.51testing.com/ueditor/php/upload/image/20230811/1691722496362977.jpg){kind=link}
- 关于我们 联系我们 版权声明 广告服务 站长统计
- 建议使用IE 11.0以上浏览器,800×600以上分辨率,法律顾问:上海兰迪律师事务所 项棋律师
- 版权所有 上海博为峰软件技术股份有限公司 Copyright©51testing.com 2003-2024, 沪ICP备05003035号
- 投诉及意见反馈:webmaster@51testing.com; 业务联系:service@51testing.com021-64471599-8017

- 51testing软件测试圈微信