 0
0 0
0


- 使用状态迁移法设计自动化驾驶测试用例——软件测试圈
ADAS概述
ADAS翻译成中文为“高级驾驶辅助系统”,全称Advanced Driving Assisstance Systems,是在汽车紧急情况下提前做出主动判断和预防,以达到预防和辅助的作用。
注意Systems是复数,因此该系统只是单一个系统,且是由许多子功能系统组成。
可以将这些子功能划分为行车和泊车两大类。行车部分常见的有AEB-自动紧急制动、ACC-自适应巡航、FCW-前向碰撞预警、LCA-变道辅助、LKA-车道保持、TLA-交通信号灯提醒、TSR-交通标志识别、ICC-智能巡航控制等。
泊车部分有APA-自动泊车、AVP-代客泊车等,而这些子系统就是发展全自动驾驶的基础,因此可以将ADAS视作自动驾驶的简化版。
LCA功能描述
LCA全称Lane Change Assistance,译为变道辅助,是通过安装在车辆后保险杠角落的两个角雷达来持续监控本车侧后方的区域,主要探测邻近车道上其它的车辆当前位置、行驶速度、行驶方向。

LCA包括BSD-盲点监测和CVW-接近车辆报警两部分。
KCA有两种视觉报警形式:一级报警是LED灯常亮,二级是LED灯闪,当一级报警激活时并且驾驶员打转向灯,此时二级报警将激活,二级报警比一级报警加强。
BSD盲点监测,实时监测车外后视镜看到盲区。当盲区内出现其它车辆,外后视镜警示灯就会一直亮着来提醒司机,避免变道风险。
若此时驾驶员向有风险侧打转向灯,系统则判断驾驶者有并线意图,此时车辆将通过位于外后视镜警示灯闪烁来警示驾驶者有撞车的危险。
CVW 车辆快速接警示系统,会监测两侧相邻车道后方70 米范围内所有车辆,通过计算判断,如有后方车辆快速接且在3.5 秒内变道有碰撞风险时,外后视镜警示灯将点亮以警示驾驶者。
若此时驾驶员仍然向有风险侧打转向灯,系统则会判断驾驶者有并线意图,车辆将通过位于外后视镜警示灯闪烁来警示驾驶者,以避免事故发生。
LCA之状态迁移法用例设计
首先,LCA功能有几大状态:OFF为关闭状态,ON为开启状态,Passive为未激活状态,Warning Level1/2分别为Active激活状态下的两种形式,Error为故障状态。

根据状态迁移法设计case的要求:针对每个状态之间转换的条件设计1个用例,具体讲解每个状态之间是如何转换的以及转换的条件有哪些。
T1(OFF——> ON): 系统无故障LCA切换到ON状态,一般默认开启,在车辆打着火时自动开启,可以通过中控上的显示菜单直接开启/关闭这个功能。
T2( ON——>OFF): LCA切换到OFF状态。
T3(Passive——> Warning Level1): 自车速度15kph-150kph;非R档;目标在CVW区(TTC<3.5s)或BSD区(无报警——>一级报警)。
TTC全称:Time To Collision,译为碰撞时间,用于判定两车之间发生碰撞的可能性、判断警告时机,可以被计算出来:TTC=两车相对距离/两车相对速度。
T4(Warning Level1/2——> Passive):自车车速低于12kph/大于150kph/R档/没有风险车辆靠近/目标在CVW区但TTC>3.5s。
T5(Warning Level1——> Warning Level2):满足T3所有条件;风险侧打转向灯,由一级报警升为二级报警。
T6(Warning Level2——> Warning Level1):关闭风险侧转向灯,由二级报警降为一级报警。
T7(Error——> ON): 系统故障恢复且故障之前状态为ON(此种状态可能会比较难理解,此处做一个说明:一旦发生故障,功能关闭,一旦故障消失,功能应该恢复到故障之前的状态)。
T8(ON——> Error):当LCA处于ON状态检测到故障 。
为了能更加精准的分析出测试行业的未来发展趋势,51Testing行业调查问卷仍需要你的助力。相信这一张张的问卷,能够为测试行业和测试人带来一些新的启发!转发有惊喜~
作者:狼图腾
- -1.00 查看剩余0%
- 【留下美好印记】赞赏支持

热门文章
最新讲堂
- 推荐阅读
- 换一换
- 随着前台开发技术的不断升级,在使用Python+Selenium进行自动化测试时,也会遇到各种各样的问题,其中最常见的一种就是元素能定位到,但是无法点击或者点击失败,那么这篇文章就来讲述一下如果遇到元素定位成功但是点击失败的情况该如何解决。 Selenium中,最常用的元素点击方法是element.click(),根据以往的自动化的测试经验来说,此方法适用于绝大多数的点击操作,那么如果遇到点击失败的情况,我们应该怎么解决呢? 方法1:设置等待时间。 最常见的元素点击失败的情况,造成的原因最多的就是元素未加载完成。 举个例子,点击产品进入产品详情,再点击加入购物车按钮,代码如下: ...

-
- 据报道,测试了很久的iOS16.4更新包含了比之前更多的小功能:新的通话语音隔离功能、照片应用中加入副本相册扩展(包含共享iCloud照片库),还针对iPhone14优化了车祸检测功能。 语音隔离功能是几年前针对FaceTime语音通话开发的,它使用软件算法来更好地隔离外界噪音,让对方能够清楚地听到用户的声音。苹果(160.25,1.32,0.83%)现在要将该功能扩展到电话通话中,对于经常打电话的用户来说,这可能会成为一大福音。 此外,iOS16.4终于要进入“发布候选”阶段。这意味着该系统最早有望在未来一周发布。目前比较受关注的功能包括已经大幅推迟的一系列新的金融产品,包括储蓄账号...
-
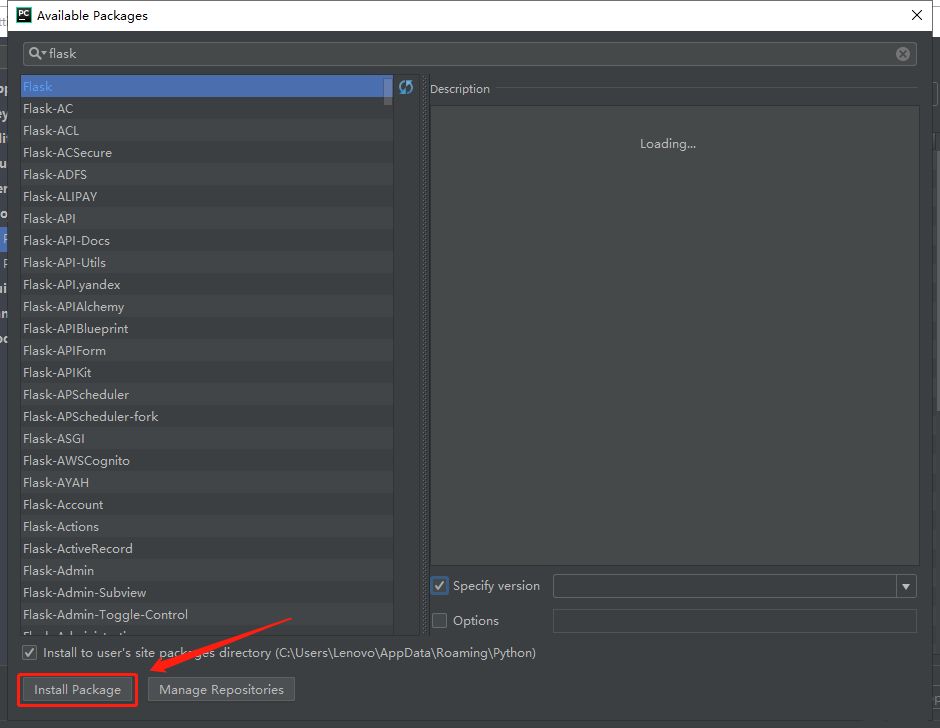
- 一、python 使用flask框架之get接口开发1、在pycharm中,安装flask 2、引入Flask模块,Flask模块实现了一个WSGI应用from flask import Flask,request import json3、app是Flask的实例,它接收包或者模块的名字作为参数,但一般都是传递(name)。让flask.helpers.get_root_path函数通过传入这个名字确定程序的根目录,以便获得静态文件和模板文件的目录。app = Flask(__name__)4、开启调试模式app...
-
- 成为别人的老师,来创建属于自己的讲堂~06-29看了那么多讲堂,你是不是也心动了,想把自己的技术分享给大家?日常工作和学习中应该会遇到很多需要注意的问题和学习心得,可以尝试动手写下来,加深记忆的同时也可以帮助他人!什么是51讲堂51讲堂包含一篇文章和一次线上交流(可选)的知识分享,是一场高浓度、有收益的纯文字类型的内容。读者可以利用碎片时间学习,既满足了读者的学习需求,也满足了讲师的创作和收益需求。具体来说51讲堂需要具备以下几个条件:1、每一篇完整的讲堂都需要包含案例支撑,确保读者的问题可以在当前的讲堂中得到完整的解答;2、讲堂之间可以相互独立,读者可以根据自己的需求选择对应的内容进行阅读;3、讲堂之间也可以相互关联,系列讲堂每个讲堂之间...

- 软件测试【个人简历】展示模板——软件测试圈05-10个人简历就职目标:软件测试工程师简历是我们求职的第一步,也是非常重要的一步。如果你简历写的一塌糊涂,那么你瞬间就会被淘汰,那么一份好的简历应该怎么写呢?一般分为如下几部分内容:1、个人基本信息对于这一部分来说,只要突出自己在个人基本信息的优势。2、个人技能情况技能的话就把你的过程改进思想和技术全部体现在里边,避免了解的词汇。3、个人学校经历具体的学校信息情况和时间。4、个人工作经历主要写哪年到哪年在哪家公司,简单描述做什么事情。5、项目经验这块最重要的,最好能有3个项目左右,如果你毕业1年以上的话,然后在这个项目写出完整的项目模块信息,对项目介绍,然后测试在项目的完整流程你做的事情,然后就是你...



,根据以往的自动化的测试经验来说,此方法适用于绝大多数的点击操作,那么如果遇到点击失败的情况,我们应该怎么解决呢? 方法1:设置等待时间。 最常见的元素点击失败的情况,造成的原因最多的就是元素未加载完成。 举个例子,点击产品进入产品详情,再点击加入购物车按钮,代码如下: ...&url=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=146659&content=utf-8&sourceUrl=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=146659&pic=http://quan.51testing.com/ueditor/php/upload/image/20231207/1701919937798169.png){kind=link}
。让flask.helpers.get_root_path函数通过传入这个名字确定程序的根目录,以便获得静态文件和模板文件的目录。app = Flask(__name__)4、开启调试模式app...&url=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=144559&content=utf-8&sourceUrl=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=144559&pic=http://quan.51testing.com/ueditor/php/upload/image/20220316/1647413991623663.png){kind=link}
的知识分享,是一场高浓度、有收益的纯文字类型的内容。读者可以利用碎片时间学习,既满足了读者的学习需求,也满足了讲师的创作和收益需求。具体来说51讲堂需要具备以下几个条件:1、每一篇完整的讲堂都需要包含案例支撑,确保读者的问题可以在当前的讲堂中得到完整的解答;2、讲堂之间可以相互独立,读者可以根据自己的需求选择对应的内容进行阅读;3、讲堂之间也可以相互关联,系列讲堂每个讲堂之间...&url=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=146304&content=utf-8&sourceUrl=http://quan.51testing.com/pcQuan/pages/artDetails.html?artId=146304&pic=http://quan.51testing.com/ueditor/php/upload/image/20230629/1688021549385761.png){kind=link}
- 关于我们 联系我们 版权声明 广告服务 站长统计
- 建议使用IE 11.0以上浏览器,800×600以上分辨率,法律顾问:上海兰迪律师事务所 项棋律师
- 版权所有 上海博为峰软件技术股份有限公司 Copyright©51testing.com 2003-2024, 沪ICP备05003035号
- 投诉及意见反馈:webmaster@51testing.com; 业务联系:service@51testing.com021-64471599-8017

- 51testing软件测试圈微信